STM32cubemx的使用
本文最后更新于 2026年4月17日 早上
1. 前言
本文主要是迁移之前的文章,然后做补充和完善。
STM32cubemx工具是一个图形化初始代码生成器,极大简化工程建立和配置等的时间消耗。详情直接见官网即可。
此工具我主要是用来测试三方模块是否正常工作,当主工程比较复杂,其中某个模块出现了BUG,那么首先就是检测模块的驱动和模块本身是否有问题,如果直接在主工程中未能找到,则就将其独立出来,用STM32cubemx来建立一个新工程,单独测试。
还有个功能就是翻阅芯片的信息和文档,非常方便。
2. 安装相关软件
STM32cubemx:其中有三个版本,linux,mac和win,根据自己系统下载即可。官网下载需要登录,未登录点下载时让你填写邮箱别乱写,他要发验证过去,不会让你直接下载的 - -|
安装java,直接去官网下载,安装的时候勾选配置环境变量即可。
我用的window,STM32cubemx下载文件里面就一个exe,直接安装,安装过程中没啥要注意的。
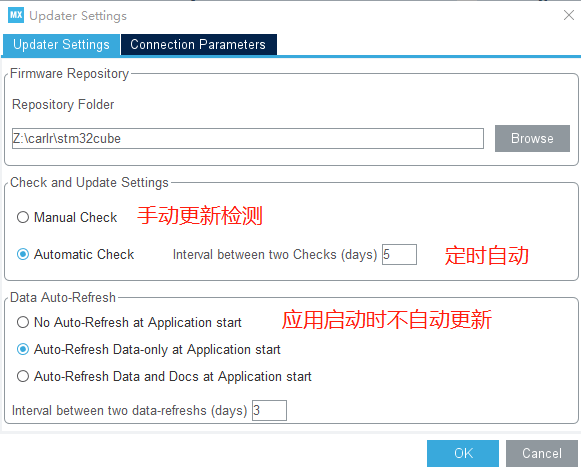
打开STM32CubeMX,它会自动更新,建议架”梯子”,不然很慢,和KEIL那个更新一样。在菜单栏help->Updater Settings可以进行配置.
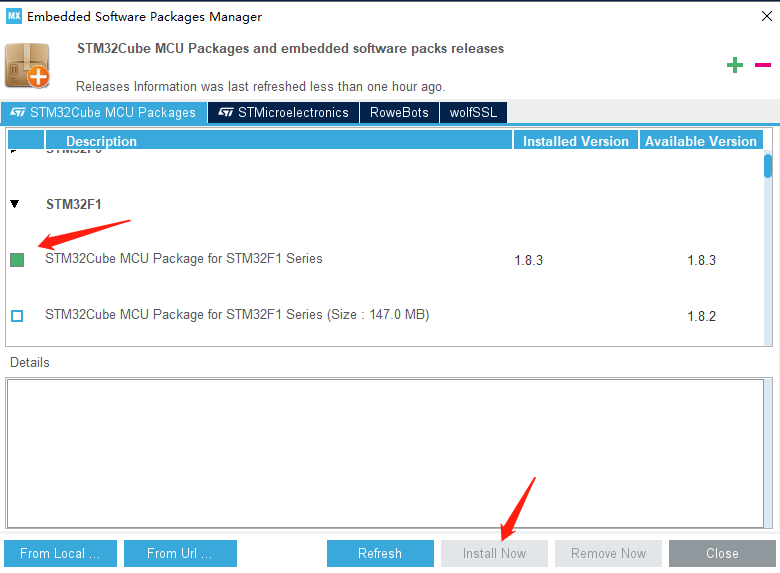
在help->Embedded software packages Manager中下载对应芯片的软件包
3. 创建工程
3.1 创建
- 菜单栏file->new project
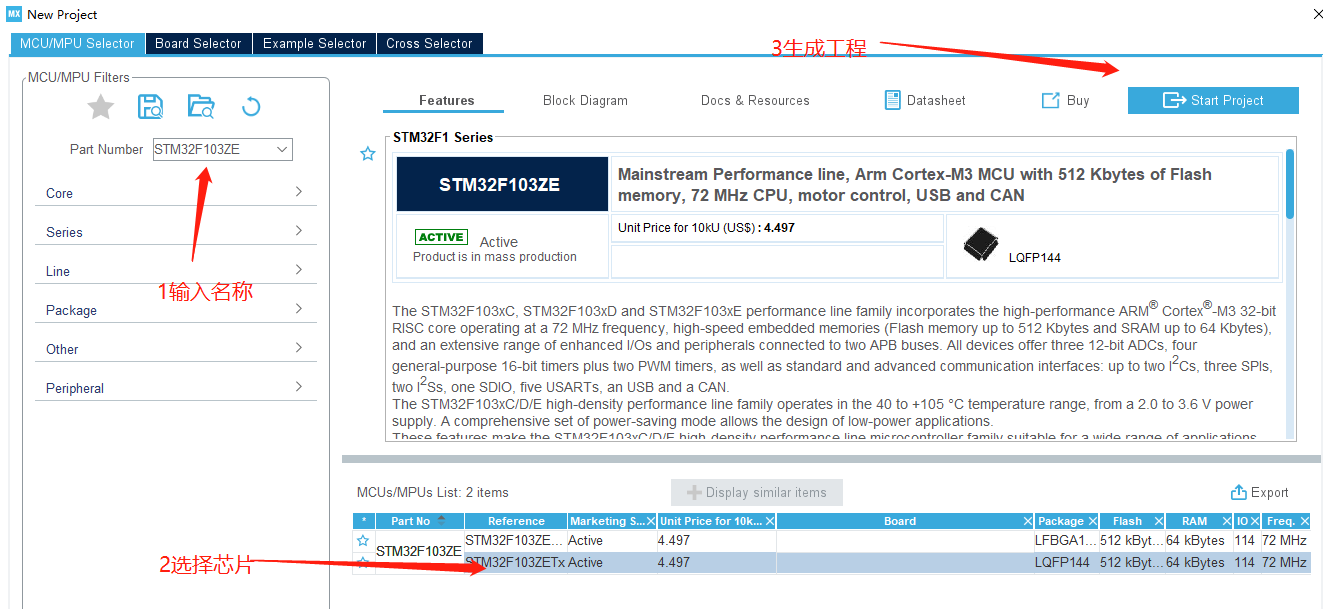 这里能方面的查看芯片的信息和相关文档!
这里能方面的查看芯片的信息和相关文档!
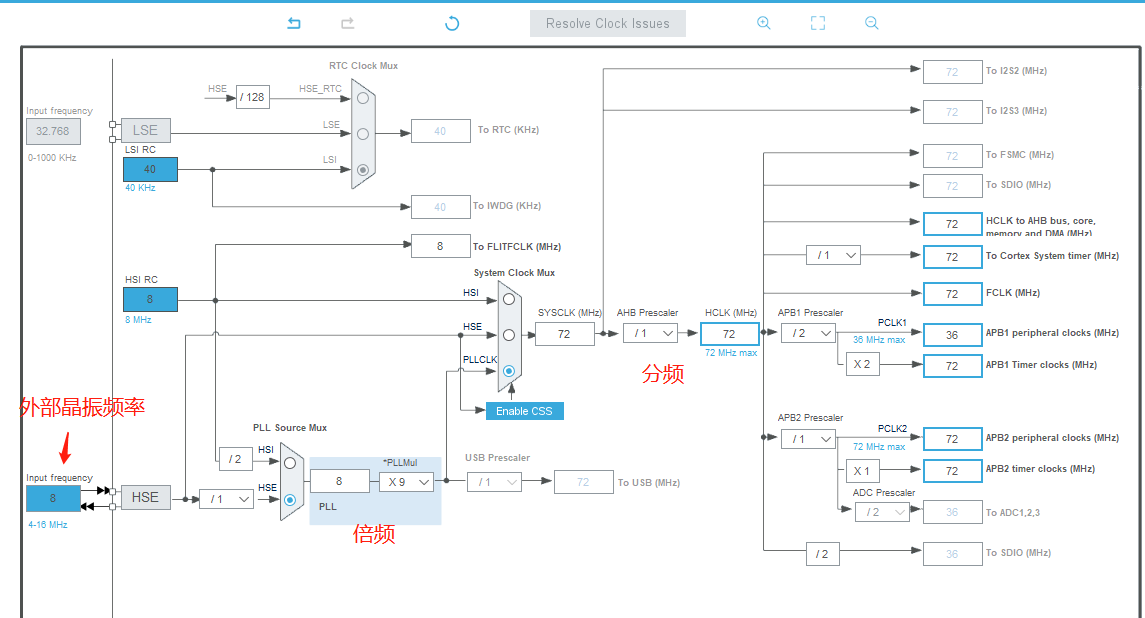
3.2 时钟配置
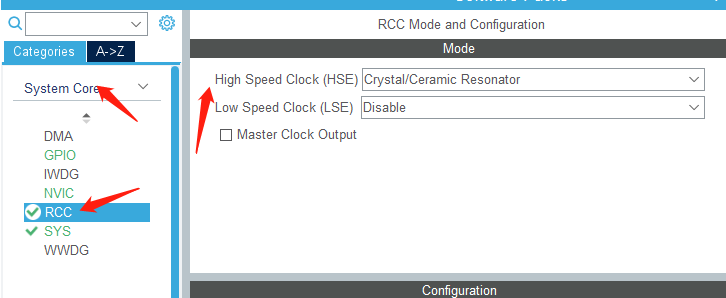
这里根据自己硬件来设置,我使用的是8M外部无源晶振。
打开左侧System Core标签下的RCC来配置高速\低速时钟的模式
- Crystal/Ceramic Resonator 外部晶体/陶瓷谐振器模式(无源晶振选这个)
- BYPASS clock source 外部时钟源旁路模式(有源晶振选这个)
然后点击菜单栏的Clock Configuration配置时钟树。
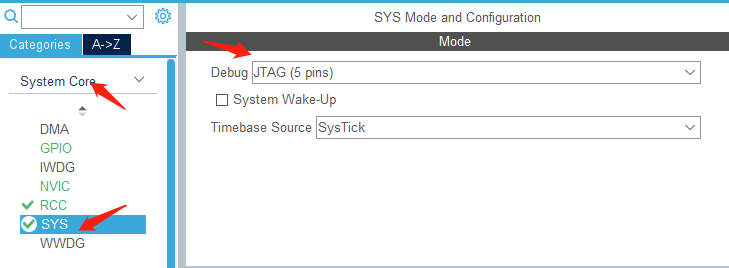
3.3 调试配置
不进行配置是无法使用调试功能的,也可以选择SW等,会初始化对应的引脚。
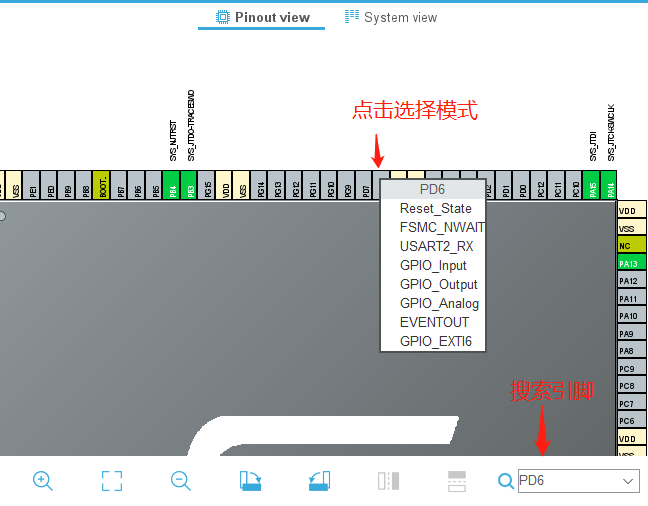
3.4 GPIO配置
在界面右侧的芯片引脚图中可以直接点击来配置所需要的引脚模式
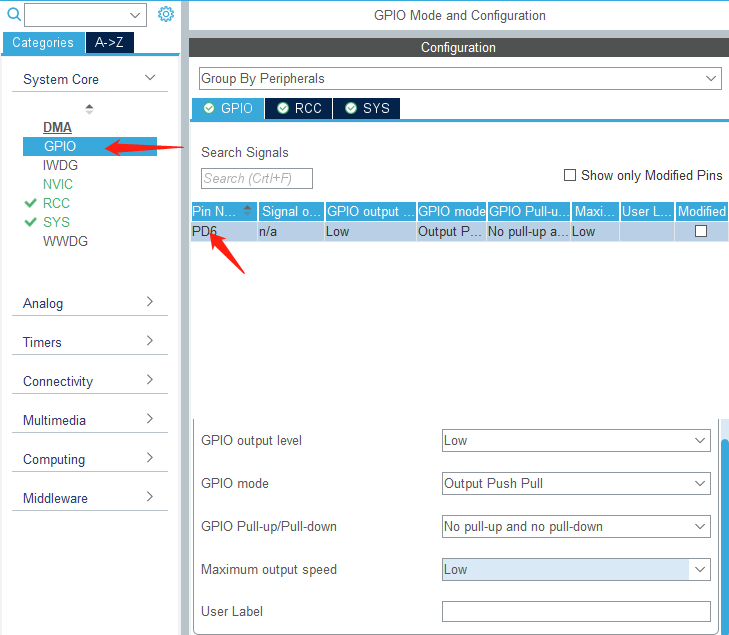
然后在左侧菜单栏选择GPIO可以进行详细设置
3.5 USART配置
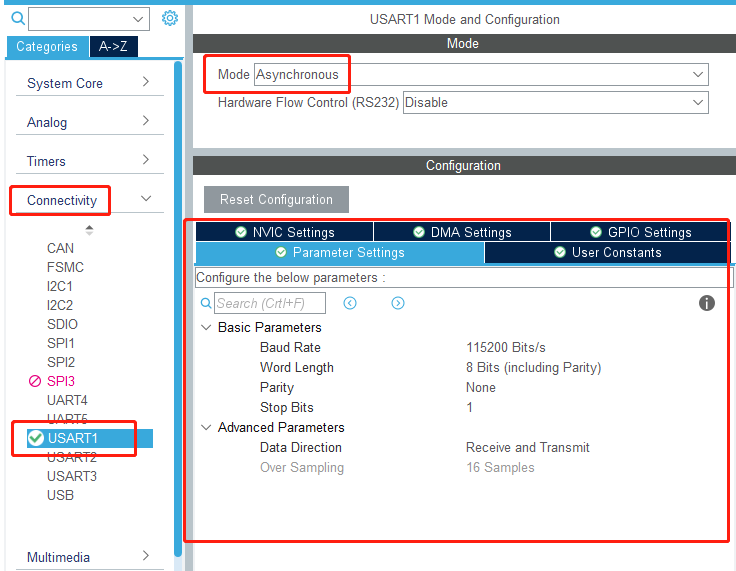
在界面左侧选择Connectivity->USART,然后设置模式为异步通信(Asynchronous),下面是串口配置,可以默认。
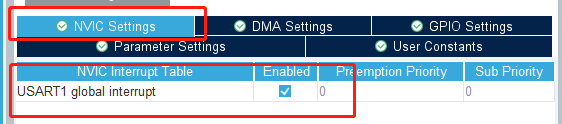
然后点击NVIC Settings勾选中断
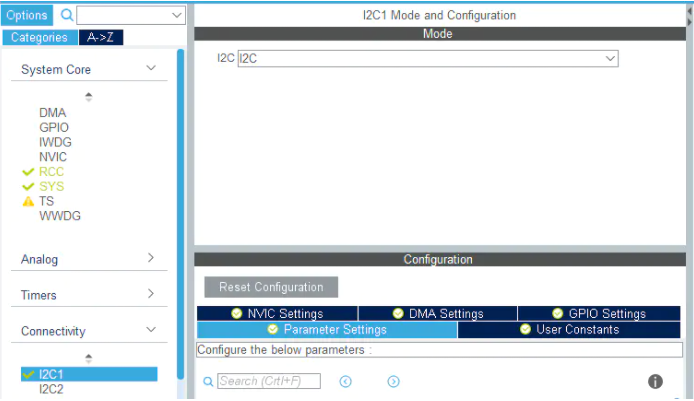
3.6 IIC配置
- 开启IIC,参数可默认
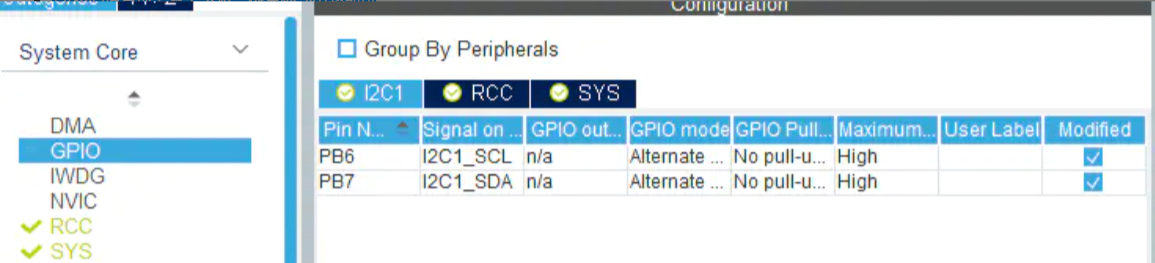
- 将GPIO设置成无需上下拉,依靠外部电路即可
- 关于生成代码,主要在i2c.c中,该工程已经将IIC初始化相关操作完成,我们要做的仅仅是进行设备的读写了而已。这里简单说明一下自动生成的代码。
他首先在工程中添加了stm32l1xx_hal_i2c.c,这便是我们调用的驱动库,然后在stm32l1xx_hal_conf.h中打开了宏#define HAL_I2C_MODULE_ENABLED,至此在算将IIC库引入了进来。
接下来便是通过驱动库来初始化IIC,i2c.c中的HAL_I2C_MspInit和HAL_I2C_MspDeInit是对引脚的初始化和反初始化,但是不需要我们来调用,他在库中被弱实现,在使用库函数HAL_I2C_Init来初始化的时候,内部将会调用此函数来进行引脚初始化,所以这里仅仅是来实现这个函数而已。实际在主函数调用的IIC初始化函数是MX_I2C1_Init,他是根据在cube中的配置信息来初始化IIC的。
3.7 PWM配置
- 选择PA2为PWM的通道
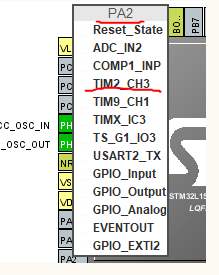
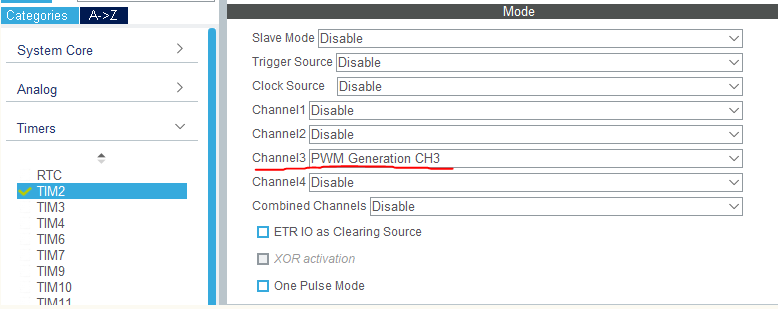
- 配置对于的时钟TIM2,选择通道3
- 配置该PWM通道,系统时钟32M(这里是由于换了芯片L151是32M的)
4. 生成代码
上侧菜单栏选择Project Manager,然后对工程进行配置
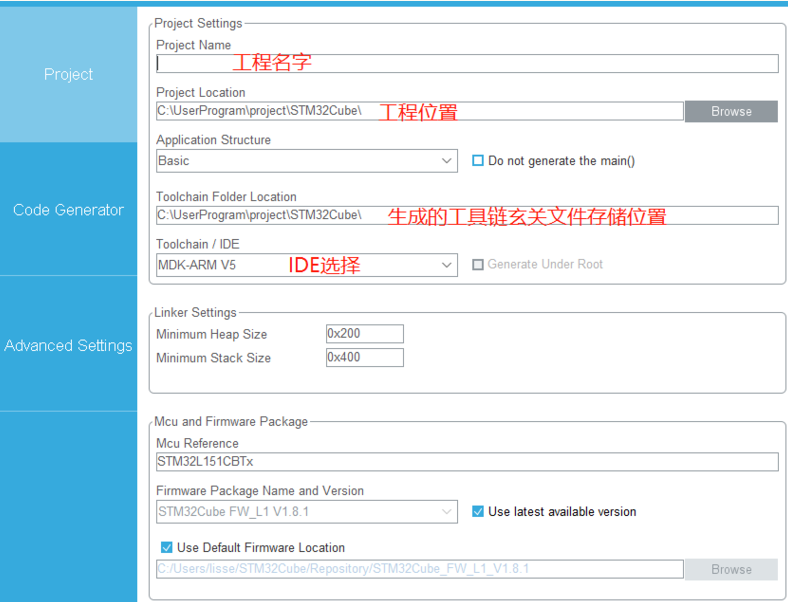
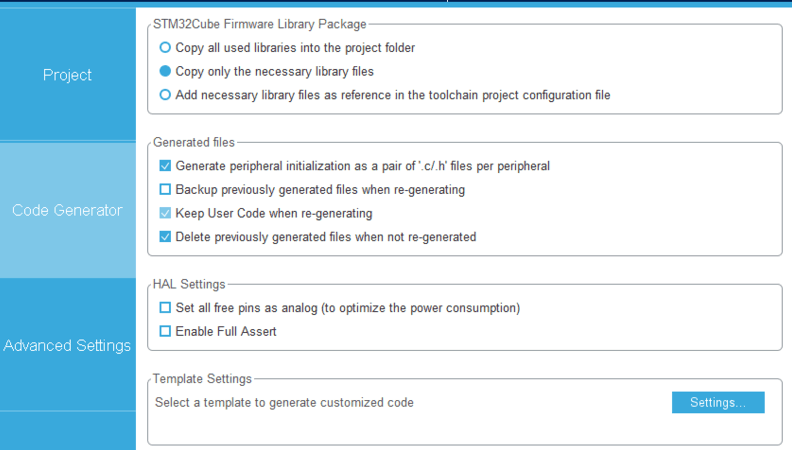
最后点击右上角的GENERATE CODE,至此便完成了工程的建立
5. keil工程
5.1 环境
5.1 GPIO例程
例程根据上列3.4配置生成
- 图形化的引脚配置被生成在了gpio.c文件中
- stm32f1xx_hal_msp.c包含使用的库函数初始化了反初始化
- stm32f1xx_it.c包含中断函数接口
- system_stm32f1xx.c里面主要是配置了时钟
- main.c中全部配置工作都已经完成,只需要在main函数中编写应用代码即可,例如不断切换引脚电平
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_Delay(1000);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_SET);
HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
5.2 USART例程
5.2.1 添加printf映射
1 | |
5.2.2 发送
串口发送实际上是将逐个字节扔到一个8位寄存器中去,然后以起始位+数据位+奇偶校验位+停止位组成一帧数据进行发送。
- 发送函数,在规定时间进行发送,未能发送成功则返回HAL_TIMEOUT
1
2HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_UART_Transmit(&huart1,txBuffer,10,0xffff); - 串口中断发送,使能发送中断后,在中断中进行逐个数据的发送,发送完成后调用回调函数。
1
2
3
4
5
6
7
8
9HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
HAL_UART_Transmit_IT(&huart1,txBuffer,10);
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
flag++;
}
}
5.2.3 接收
阻塞接收,在规定时间内程序阻塞在此等待接收规定的数据个数
1
2HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
HAL_UART_Receive(&huart1,rxBuffer,3,5000);中断接收,在需要接收的位置启动HAL_UART_Receive_IT,数据接收完毕后将触发接收完成中断HAL_UART_RxCpltCallback
1
2
3
4
5
6
7
8
9HAL_UART_Receive_IT(&huart1, rxBuffer, 1);
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1)
{
recvDataNumber++;
HAL_UART_Receive_IT(huart, rxBuffer, 1);
}
}
5.3 IIC例程
测试程序-HTU21D温湿度
以下列举库中我们可能用到的库函数,取至库函数抬头的注释
1 | |
编写两个函数,一个发送命令使其复位传感器,一个读温度数据
前者的命令格式是地址+命令,所以使用了HAL_I2C_Master_Transmit,通信成功了就返回0
1 | |
这里补充一下,IIC设备非常多,很多传感器说明文档的地址表述方式不一样,使其有的需要自己移位来得到实际填入地址,有的着不需要。当然你可以自己仔细看文档,然后再追踪代码看库函数的具体实现,得到自己应该填写的地址,这里库函数仅仅是补上了读写位。 还有一种比较暴力的方法,但是挺好用的,那就是轮询地址。反正一般地址就0到FF间,一个循环,几秒钟的找出来了。
例如上列修改成
1 | |
然后就会看到在0X80和0X81的被打印出来,一个读一个写。
然后时读温度函数,这里需要用的具体寄存器地址所以需要使用HAL_I2C_Mem_Read函数
1 | |
5.4 PWM代码
主函数中初始化了GPIO和TIM,前者仅仅打开了GPIO的时钟,主要初始化在TIM中。
1 | |
在tim.c则进行了对于通道引脚初始化和定时器PWM初始化
1 | |
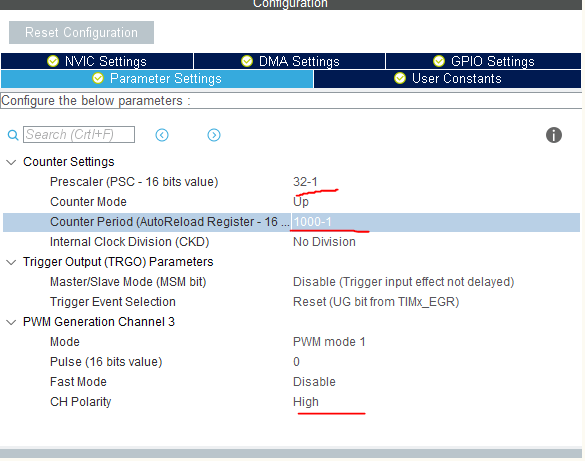
定时器初始化的时候将进行时钟配置,这决定了PWM的频率,Prescaler表示分频数,表示如果最终分频到TIM的时钟是32M,那么实际使用时钟则是32/Prescaler。Period代表定时器计数达到多少后重新装填,对于PWM来说就代表了一个周期,所以PWM的频率就等于48M/Prescaler/Period。Pulse就对应占空比了,他代表当前计数,占空比 = Pulse/Period
1 | |
之后的启动和占空比修改就需要自己调用stm32l1xx_hal.time.c中的函数来执行了
| 函数 | 说明 |
|---|---|
| HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel) | 启动对应通道的PWM |
| HAL_StatusTypeDef HAL_TIM_PWM_Stop(TIM_HandleTypeDef *htim, uint32_t Channel) | 停止对应通道的PWM |
| 宏 | 说明 |
|---|---|
| __HAL_TIM_SET_COMPARE(HANDLE, CHANNEL, COMPARE) | 配置对于通道占空比 |
下面是在tim.c中添加的函数
1 | |
最后在主函数中调用进行测试
先添加打印定向,使其能够printf输出
1 | |
然后启动PWM,设置占空比50%
1 | |
- STM32L系列定时器通道对应关系
| 引脚号 | 定时器通道 |
|---|---|
| PA0 | TIM2_CH1_ETR |
| PA1 | TIM2_CH2 |
| PA2 | TIM2_CH3 |
| PA3 | TIM2_CH4 |
| PA6 | TIM3_CH1 |
| PA7 | TIM3_CH2 |
| PB0 | TIM3_CH3 |
| PB1 | TIM3_CH4 |
| PB6 | TIM4_CH1 |
| PB7 | TIM4_CH2 |
| PB8 | TIM4_CH3 |
| PB9 | TIM4_CH4 |